
Achieving wide-scale ADAS implementation requires more efficient validation methods, as economic pressures, shorter development times and evolving SDV features demand stable, repeatable testing – and a shift toward early fault detection through advanced simulation
For a long time, Tier 1s and OEMs have used X-in-the-loop methodology to validate the functions of components and vehicles. This means starting with simulation only and moving closer to reality by changing simulated elements to real hardware step-by-step until they test the entire vehicle.
This strategy has been highly effective for traditional vehicle domains such as the powertrain or chassis. For ADAS, the key difference is that the vehicle now senses and communicates with its environment using various sensors.
This presents two new challenges: for simulation-based methods, testing teams need high-fidelity models of sensor behavior and corresponding plant models. In addition, ADAS works in a much more distributed manner than conventional systems, so higher integration of test systems is needed.
Solutions to either problem have not been available until today, so ADAS system validation depends on costly test drives with expensive vehicles. However, road testing offers limited reproducibility and is dependent on unpredictable influences.
The goal
These challenges have formed the vision of a leading OEM to enable better lab-based testing. Combining the advantages of hardware-in-the-loop – repeatability, 24/7 automated operation independent of outside conditions – with the high confidence of testing with the fully integrated vehicle has led to the new approach of vehicle-in-the-loop testing. This will enable continuous use of the test catalog, reuse of test methodology and results, and automated and reproducible testing. Increasing the validation efficiency will also reduce the use of test vehicles.
Test bench setup and sensor emulation
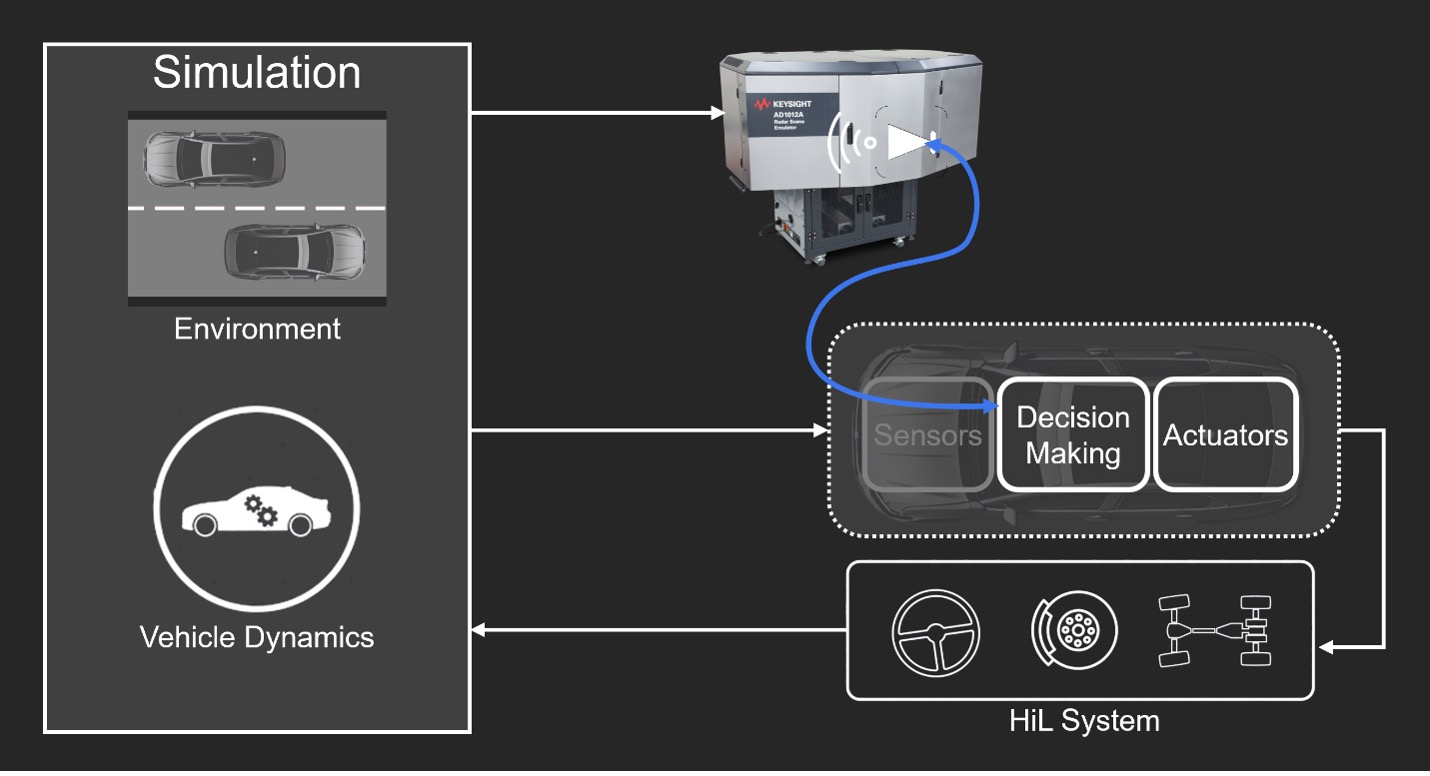
Figure 4 illustrates the steps necessary to achieve the transition from a full simulation-based SIL test system to VIL testing on a complete test bench. In an entirely software-based setup, everything is simulated: vehicle dynamics of the ego/host vehicle, its environment and all relevant sensors. Typically, sensor simulation will be based on objects from the environment simulation. Moving toward HIL, the vehicle, surroundings and driver continue to be fully simulated.
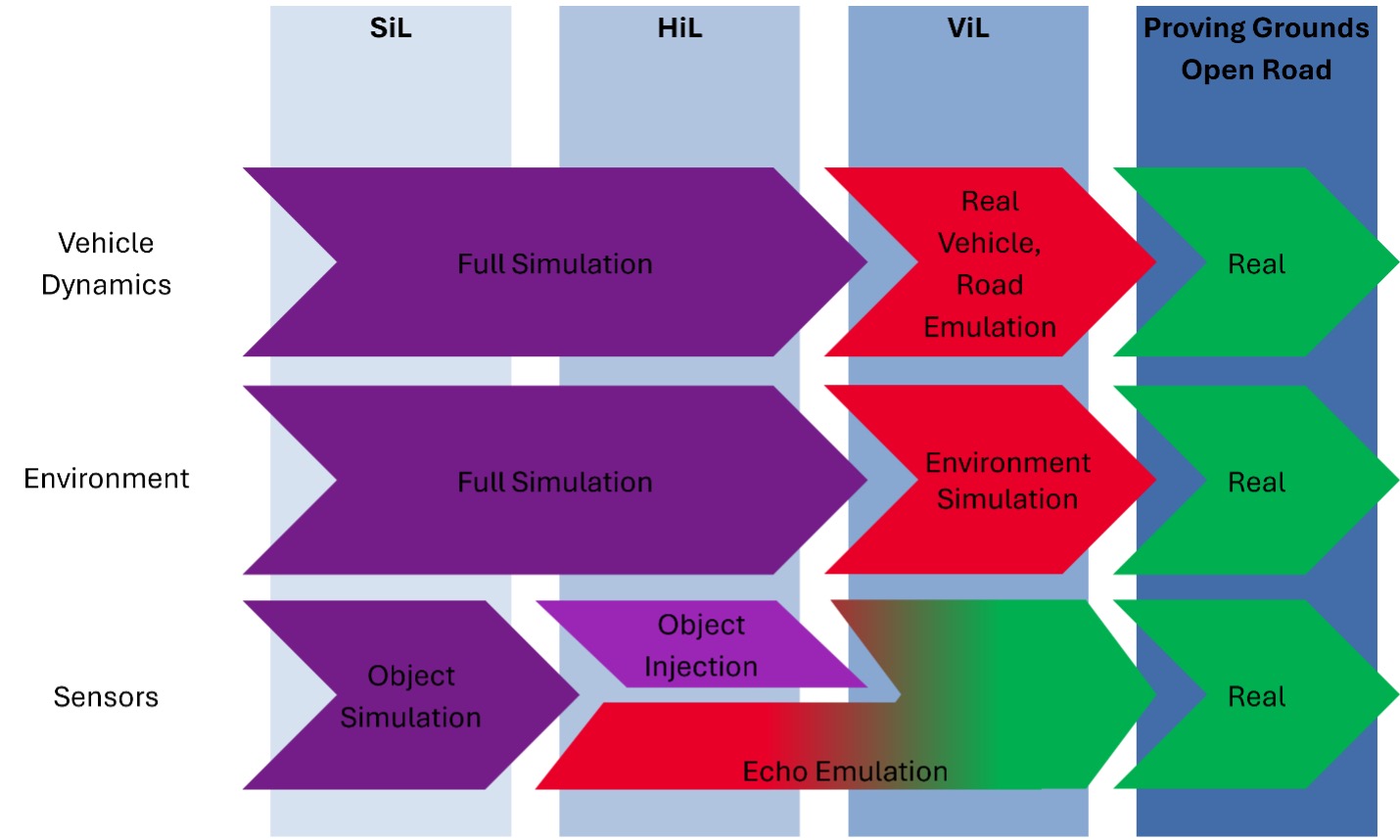
For sensors, these steps are more complex, involving two methods:
- Object injection: bypassing the sensor’s RF part and injecting objects directly into the signal path. This can be done either by pure software simulation via unique bus signals or a measurement/calibration/diagnostics (MCD) interface, or by connection via hardware. For cameras, this is typically straightforward due to more standardized transmission paths. For radar sensors, specially modified radar units with a test mode to inject echo or object information directly, bypassing the RF front end of the sensor, are available from the Tier 1s. Due to this special mode, the sensor software and hardware must be manipulated, reducing the test’s realism.
- A better approach is called echo emulation, which generates actual echoes of the radar signals over the air and manipulates them to create realistic representations of the world within the radar’s field of view. Hundreds of radar pixels, or rixels, generate a highly realistic ‘view’ of the environment to the radar sensor. This means that final radar hardware and ECUs can be integrated into the test system, which immensely increases the integration test’s fidelity level. This method, also known as scene emulation, enables modeling of a complete scene for the radar sensor versus only a few objects in previous approaches.
When switching to VIL, object injection for radar sensors with critical functions for ADAS will no longer work. A production or pre-production sensor that operates in normal mode is required. If workflows already use scene or echo emulation during HIL testing, the existing test configuration can be employed for VIL testing. If not, the transition from object injection to echo emulation for this phase is required.
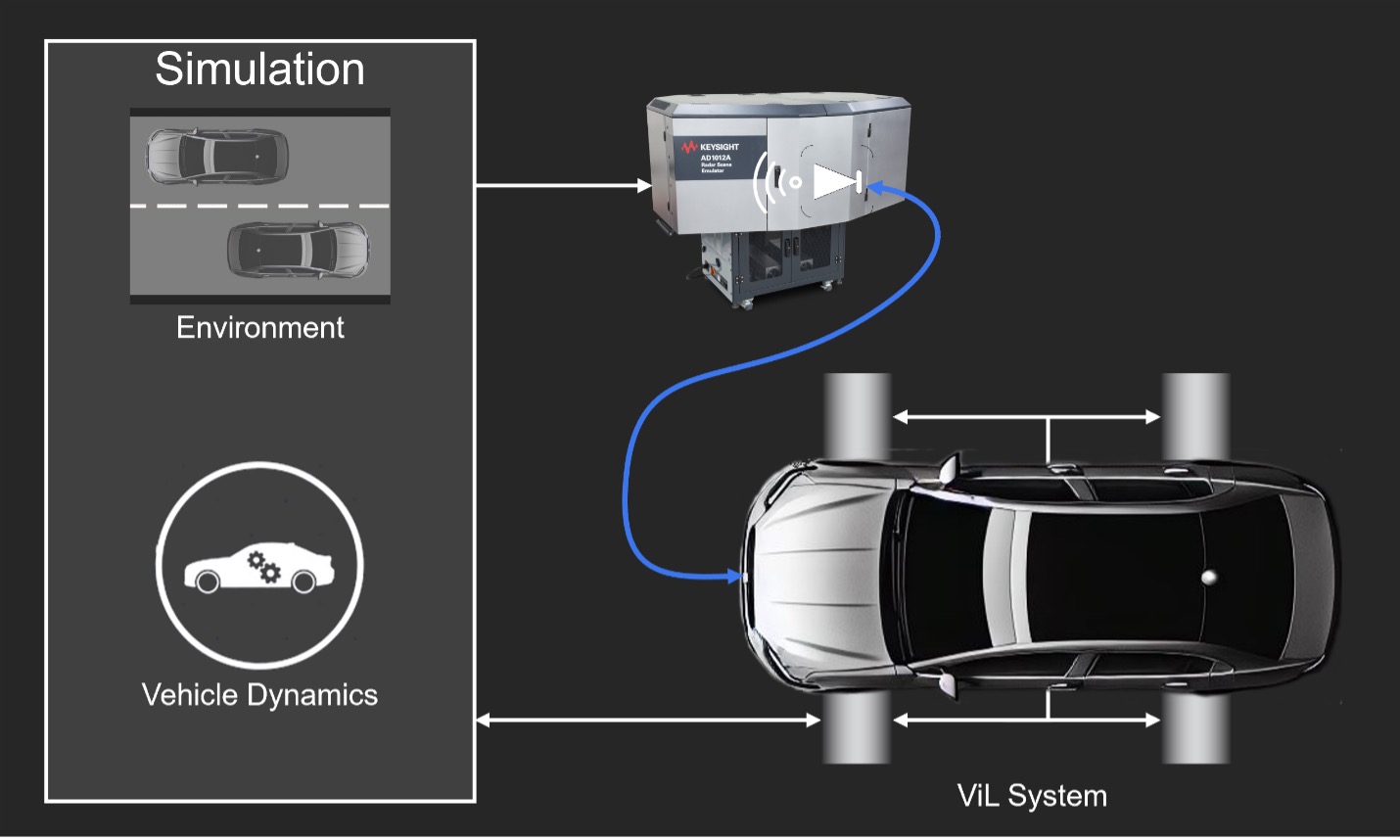
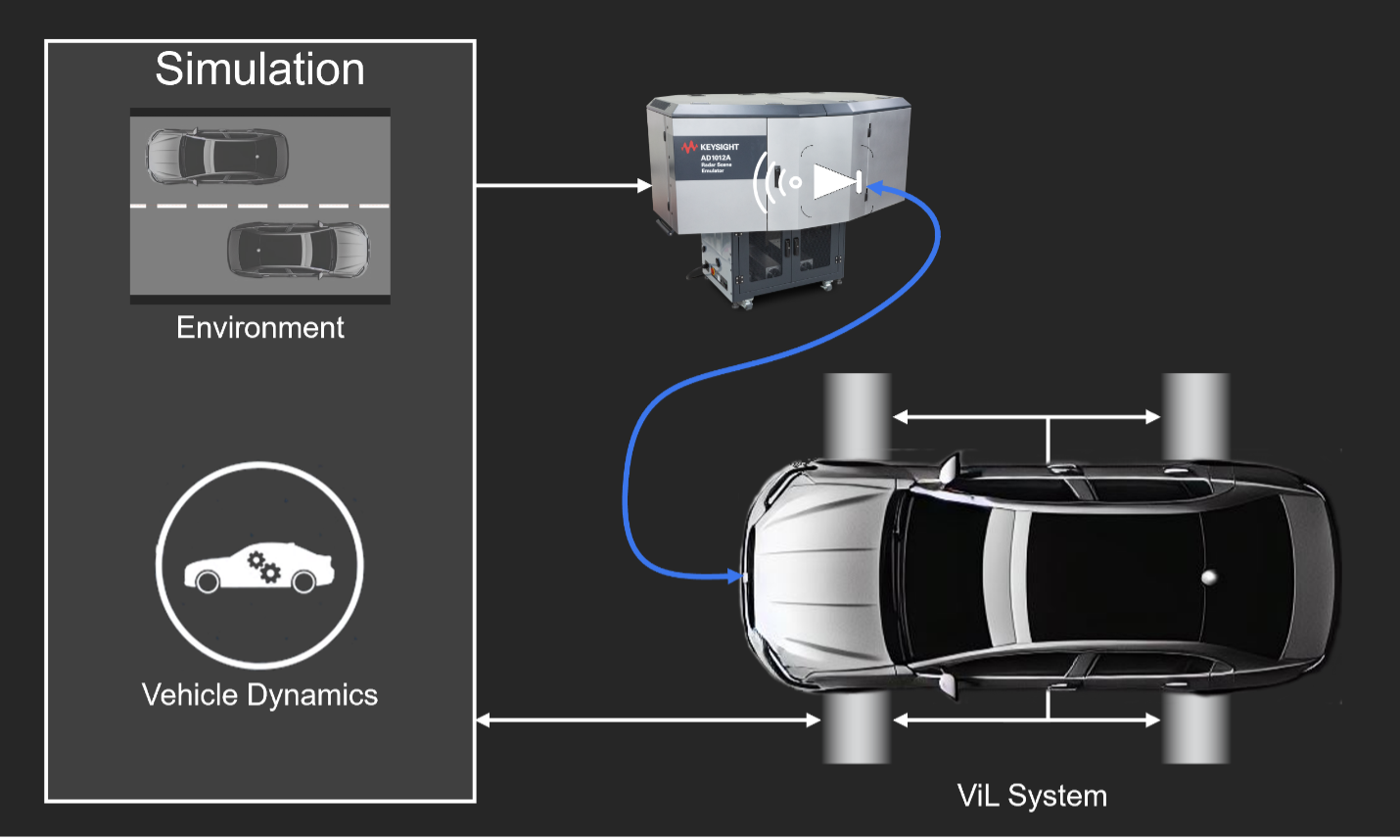
The changeover from HIL to VIL is also more complex for the other two areas: the vehicle and road model must be separated, as the vehicle is now used entirely. The road is still simulated, as is the contact between the tires and the road. The interface between the vehicle and the simulation is the test bench, which realistically provides each wheel’s drive and braking torques individually. For more complex testing, it must also support steering. The wider environment is still simulated, and information on radar echoes and camera images is passed on to the sensor emulation.
At this point, the entire vehicle is tested, with almost all its systems operating in the same way as on the open road, with two exceptions:
- The team will operate the radar sensor outside the vehicle in a sealed chamber called a radar scene emulator (RSE). The Radar Scene Emulator from Keysight contains hundreds of rixels that generate echoes and effectively isolate the sensor from unwanted disturbances from the test bench or other interference in the lab. Also, it ensures that the emulated scenario perceived by the radar is synchronized with the simulated environment: a brake actuation, for example, will cause a vehicle to pitch forward, resulting in a more downward field of view of the radar sensor.
- The global navigation satellite system and inertial measurement unit sensors need to be spoofed, as both would measure a stationary vehicle, which is different from the virtual movement of the vehicle in the simulated world.
Put it to the test
Bringing this vision to life has required the close cooperation of several participants, each bringing in their equipment and respective expertise, including:
- An actual vehicle under test and the know-how needed for integration with the other parts, mainly the test catalog with key performance indicators (KPIs).
- For the test bench, an existing complete four-wheel control and steering system and corresponding safety equipment were configured to fit the vehicle.
- Closing the loop between the vehicle and the test bench: a real-time HIL system. An inner loop links the vehicle’s powertrain, steering and brake system with the test bench and the vehicle dynamics model. The most critical and time-consuming step was configuring the timings, torques and wheel speeds to align with the model’s parameters. This ensures the vehicle’s stable and repeatable operation on the test bench.
The outer loop must be configured and stabilized once essential driving works. This ensures the vehicle operates in the virtual world on simulated roads. The HIL environment provides ultrasonic, corner radar and IMU data injection. The camera and the front radar are needed for the full operation of the ADAS system. The radar sensor is placed inside the RSE, and proper alignment relative to the vehicle must be configured and fine-tuned in the vehicle model running on the HIL (Figure 3). The same is true for the camera, which looks at a massive screen in front of the vehicle in this setup. Another critical step is synchronizing the sensors, which also involves adapting the timing of information flowing from the simulation environment to the emulators.
Results
The first tests using the fully integrated VIL test bench focused on basic NCAP scenarios, such as emergency braking and adaptive cruise control.
While performing these tests, the full value of the VIL approach was evident. Scenarios can be loaded with a mouse click, and the behavior of other road users can be modified easily. This enabled successful performing of a catalog of test cases within a few hours, which would have taken many days of testing on a test track.
In conclusion, the introduction of echo emulation via the RSE test framework for radar sensors represents a new way to support the United Nations’ vision for road safety (The UN Road Safety Strategy was launched in 2019, with the objective of reducing the number of fatalities due to road traffic crashes by 50% by 2030). This innovation and its integration into a VIL system can enable efficient, repeatable and extensive tests in a lab environment, accelerating the validation process and ensuring more reliable and comprehensive safety assessments. This advancement paves the way for safer roads and more advanced vehicle technologies to mitigate human error and enhance road safety.
Related news: Read a feature from Laird Performance Materials exploring how to test to ensure ADAS radar accuracy


