
Vehicular communications, a cooperative communication technology, has been heralded as key to improving autonomous driving and making roads safer. A great deal of focus has been placed on driverless cars, but less thought has been given to how these vehicles can safely interact while in use. Vehicular communications is an excellent solution, facilitating uninterrupted, high-speed, authenticable interactions between moving vehicles.
It is typically sorted into four use cases: communications of vehicles to other vehicles (V2V), vehicles to road-side infrastructure (V2I), vehicles to pedestrians (V2P), and vehicles to the cellular network (V2N). Together, they are referred to as vehicles to everything (V2X) and have the capacity to dramatically improve our roads.
Undeniably, V2X technology will provide safety features far beyond what is offered in other advanced driver assist systems (ADAS). Most existing systems rely on computer vision, radar, or lidar technologies. The problem with such technologies is that their signals cannot penetrate through vehicles. No information is available about vehicles outside the line of sight. Conversely, V2X provides critical information about vehicles inside and outside the line of sight, if they are inside a specified communications range.
To implement V2X technology, two types are being put forward: dedicated short-range communications (DSRC) and cellular vehicle-to-any-device (C-V2X) communications. Both are made to operate at the 5.9GHz band and must adhere to the following stringent delay and reliability requirements: a communications latency with a delay of less than 100ms; a communications range of at least 300m; and supported vehicular speeds equivalent to typical highway velocities.
A derivative of wi-fi technology, DSRC’s communications protocols (PHY and MAC layers) are specified by the IEEE 802.11p standard. Its supporters say all aspects of DSRC standards and all safety considerations have been addressed in the last eight years of development. DSRC has recognized limitations, including support only for the V2V and V2I applications and an upper bound of reliability for vehicle density and communications range.
Founded on 4G-LTE cellular technology, C-V2X is part of the device-to-device (D2D) communications protocol of the sidelink (proximity server) mode of the LTE-Advanced standard. It allows every device to detect every other device in its proximity directly. Unlike DSRC, it supports the V2N and V2P vehicular communications use cases. Compared with DRSC, it supports higher speeds (up to 250km/h (155mph)) and higher density (thousands) of vehicles. Additional reports state that the cost of developing a C-V2X- based solution is far less than that of developing DSRC.
 Currently, neither has been selected as the official V2X technology in any country. It is likely that both will be adopted, and vehicles equipped with a smart way to understand and decode data transmitted and received through each of these technologies.
Currently, neither has been selected as the official V2X technology in any country. It is likely that both will be adopted, and vehicles equipped with a smart way to understand and decode data transmitted and received through each of these technologies.
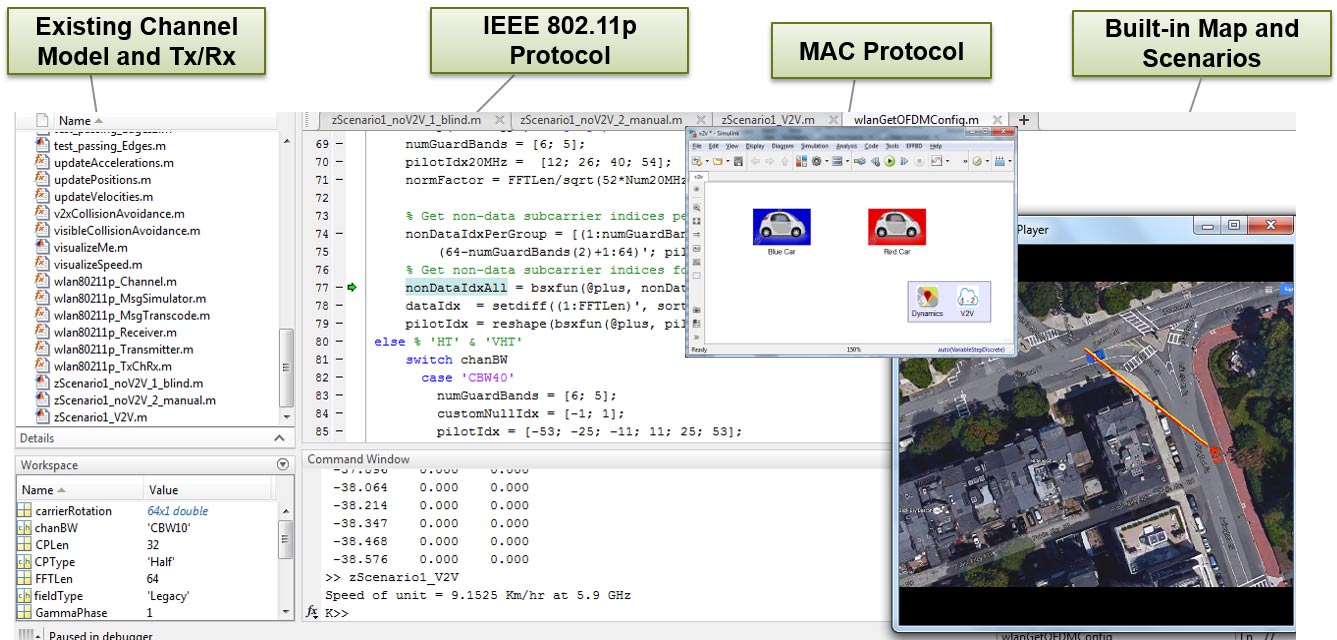
It is essential to ensure safety-critical applications and devices like V2X work exactly as they were intended. Using computer simulations and model-based design tools it is possible to visualize and analyze various traffic scenarios and vehicular dynamics and to test that the V2X system provides collision avoidance as expected.
Urban safety and vehicular transportation is transforming radically through automation. With more cars on the roads using these types of automated driving features, including V2X, it will be possible to substantially improve the safety and security of driving.


